video
Deep Learning Course - Level: Advanced


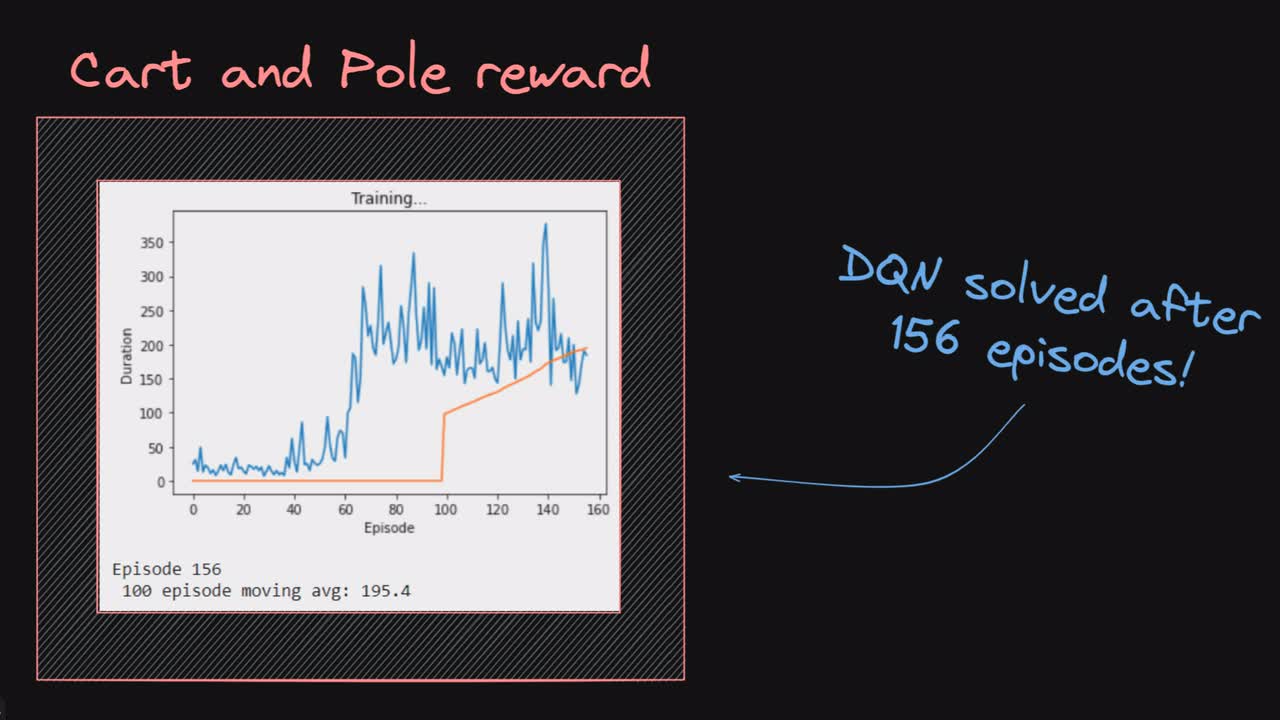
Welcome back to this course on reinforcement learning! In this episode, we'll discuss how we can tune our current code project in order for our deep Q-network to solve the Cart and Pole environment.
We last left off having completed our program by training our deep Q-network on the Cart and Pole environment. There, we saw that the network's average reward consistently grew over the 1000 episode training duration, with its final score reaching 100-episode average reward of 90.
Committed by on
 DEEPLIZARD
Message
DEEPLIZARD
Message