CNN Forward Method - PyTorch Deep Learning Implementation
video
lock
text
lock
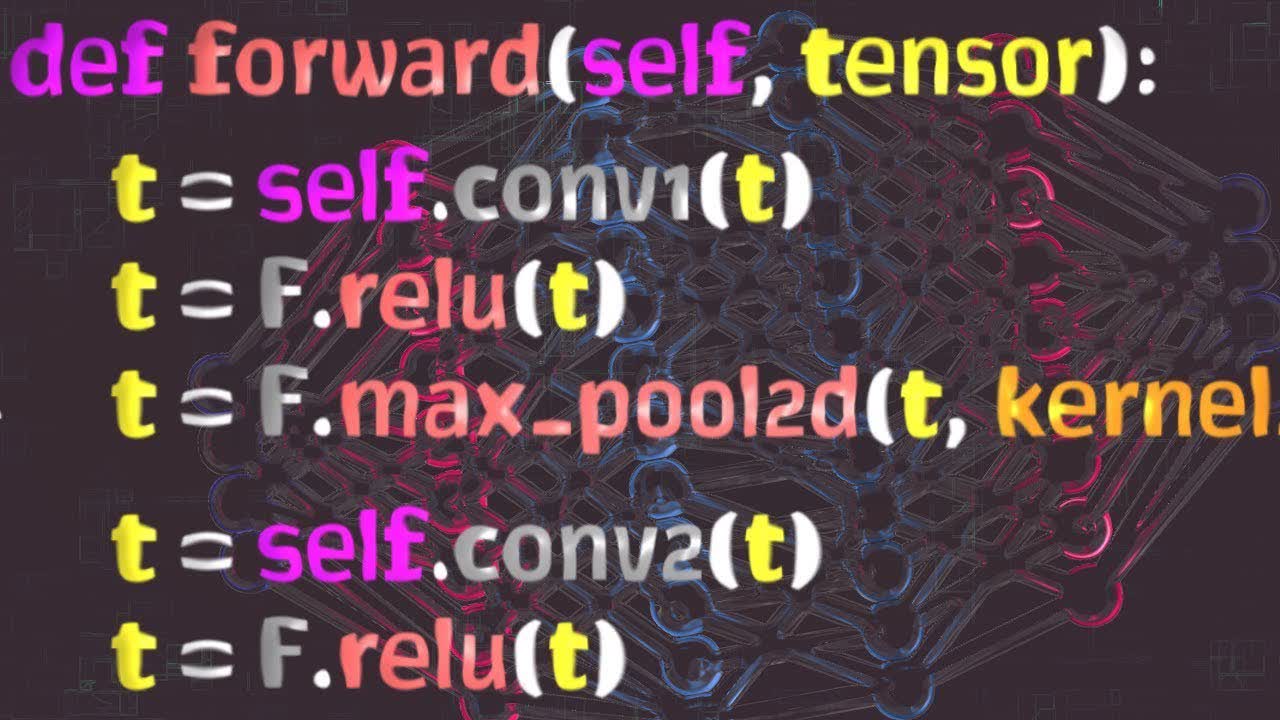
CNN Forward Pass Implementation
Welcome to this series on neural network programming with PyTorch. In this one, we'll show how to implement the forward method for a convolutional neural network in PyTorch.


 DEEPLIZARD
Message
DEEPLIZARD
Message